
Ce cours traite des méthodes de modélisation et de régulation de systèmes :
- Modélisation et identification des systèmes.
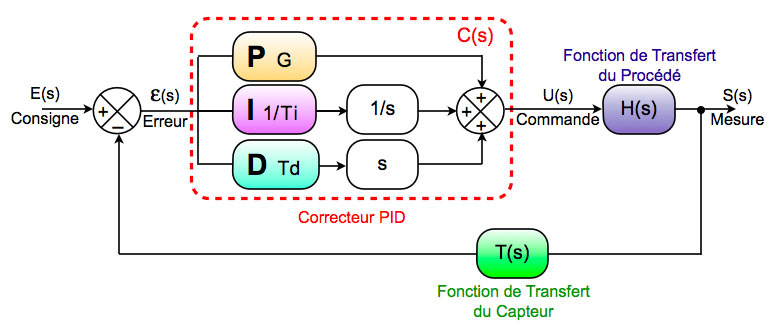
- Synthèse de correcteurs fréquentiels : PI , PID.
- Analyse d’un asservissement : précision, rapidité, marges de stabilité.
- Application à la commande de moteurs.